Motorstyring:
MCU-fri sinusformet styring av permanentmagnet synkrone motorer
I stedet for å sette i gang et omfattende MCU-utviklingsprosjekt, kan styring av PMSM-motorer ivaretas av en enklere driverkrets.
Denne artikkelen er 2 år eller eldre
Både børsteløse DC (BLDC) og permanentmagnet synkron motor
(PMSM) krever begge elektronisk kommutering for å skape et roterende
elektromagnetisk felt, som er nødvendig for å snurre rotoren. Begge er synkrone
maskiner, hvor magnetfeltet og rotoren beveger seg med samme hastighet.
BLDC vs PMSM
Hovedforskjellen mellom disse to motortypene ligger i konstruksjonen av statorviklingene. Således er BLDC ideelt kommutert ved hjelp av en trapesformet bølgeform som kan opprettes relativt enkelt. I motsetning til dette krever PMSM (som vist i bildet over), en sinusformet kommutasjonsbølgeform som er mer komplisert å lage.
Selv om det krever en mer kompleks bølgeform, drar PMSM nytte av lavere dreiemomentrippel og redusert hørbar støy. Av denne grunn er det ofte den foretrukne motortypen i applikasjoner som krever jevn og rolig bevegelse, for eksempel avanserte husholdningsapparater, elektroverktøy og industriell automatisering.
MCU-design
Historisk sett har sinusbølge-kommutering blitt håndtert ved hjelp av algoritmer implementert i fastvare i mikrokontrollere (MCU), som krever omfattende optimalisering og finjustering for å fungere med den valgte motoren og oppfylle kravene til applikasjonen. Dessuten må MCUens ytelse være tilstrekkelig til å eksekvere styringsalgoritmen opp til den maksimalt nødvendige hastigheten, samtidig som den håndterer prosessering på applikasjonsnivå.
Posisjonsdeteksjon og mykstart
I motsetning til en motor med børster, der bare å påføre strøm vil sikre at de riktige spolene aktiveres for å starte motoren tilfredsstillende, uavhengig av hvor rotoren sist stoppet, krever start og drift av en BLDC-motor kunnskap om gjeldende rotorposisjon. Dette er nødvendig for å la de riktige spolene bli eksitert og rotoren begynne å rotere i riktig retning. Ofte monteres sensorer på børsteløse motorer for å detektere denne posisjonen. Alternativt kan et sensorløst oppsett spare utgiftene og de potensielle pålitelighetsproblemer knyttet til sensorer (som f.eks. Hall-enheter).
I dette tilfellet er det nødvendig med teknikker for å bevege den stasjonære rotoren til en kjent startposisjon før spolene aktiveres. Uten riktige forholdsregler kan rotoren og alt som er festet til den piske tilbake i feil retning.
Når spolene er aktivert, må dette gjøres på en måte som forhindrer PWM-svitsjing i å generere overdreven støy og vibrasjoner i løpet av den tiden der ingen brukbar bakover- EMF er tilgjengelig for å bestemme rotorvinkelen. I hovedsak driver motorstyringsalgoritmen motoren i blinde. Når tilstrekkelig bak-EMF er tilgjengelig, kan motorkontrolleren bytte til den valgte styremetoden.
Finjustering av motorstyringen
Evnen til å starte motoren og velge hastighet er imidlertid bare en del av funksjonene som trengs for at det skal fungere riktig. Konstruktøren av motorstyringen må ha fleksibilitet til å integrere styringen med MOSFETer med passende spenning og effekt for applikasjonen. De krever også muligheten til å optimalisere parametere (som akselerasjon, ledevinkel og PWM-frekvens) for å sikre at systemet vil reagere som det skal på brukerens input, og maksimere energieffektiviteten under alle driftsforhold.
MCU-fri styring
Toshiba TC78B011FTG sinusbølge pre-driver avlaster ethvert behov for en MCU. Denne parametriserbare brikken for sensorløs trefase børsteløs motorstyring er en pulsbreddemodulert (PWM) chopper som kan kobles til eksterne lavside- og høyside N-kanals MOSFETer, noe som muliggjør en skalerbar inverterimplementering for å matche en rekke forskjellige motorer.
Mens komponenten gir hastighetskontroll i åpen sløyfe, er styring i lukket sløyfe som opprettholder målhastigheten upåvirket av strømforsyning eller lastvariasjoner, med en justerbar hastighetskurve, et mer typisk krav. Dette kan oppnås ved å konfigurere den nøyaktige driftsmodusen via I2C-grensesnittet, med mulighet for å lagre innstillingene i et ikke-flyktig minne (NVM). Derfor kan passende innstillinger programmeres under produksjon for kretser som ikke bruker en mikrokontroller eller prosessor.
Flere funksjoner
På den annen side kan motorhastigheten justeres ved å skrive til et register gjennom brikkens I2C-grensesnitt, og kan også bestemmes ved hjelp av enten en PWM-inngang eller et analogt signal. Bremsing og retning styres også via registerinnstillinger eller eksterne pinner. Motorstrømmen og rotasjonshastigheten kan leses fra eksterne pinner mens motoren går.
Mer nøyaktig posisjonering
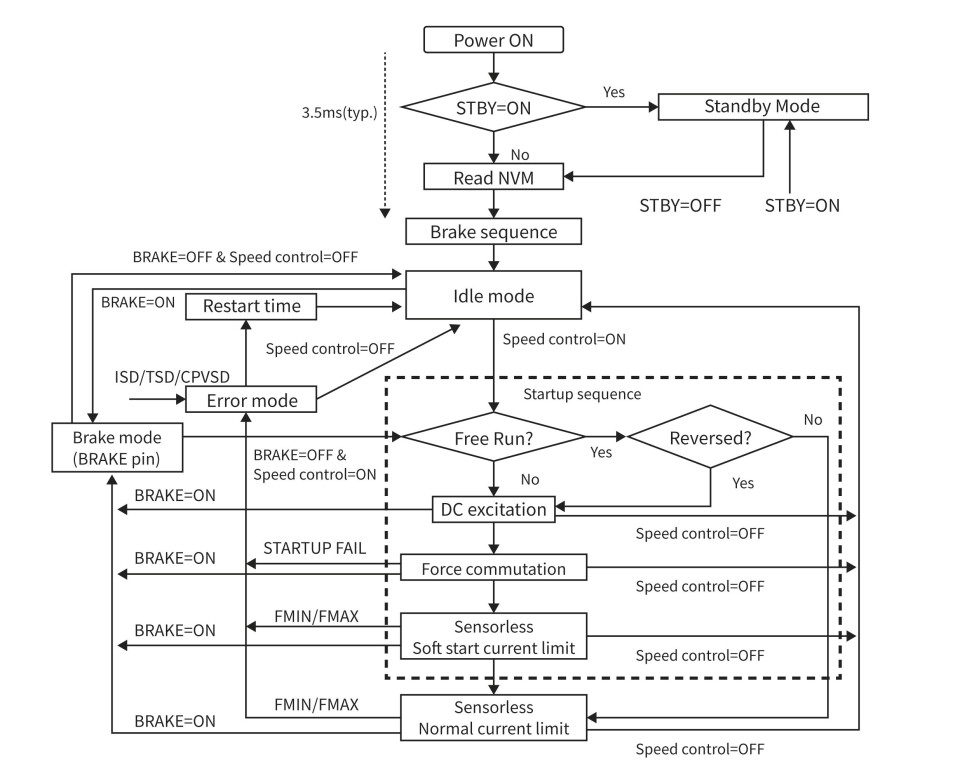
Etter oppstart henter TC78B011FTG den lagrede enhetskonfigurasjonen fra sin NVM (se figur 2). På dette tidspunktet kan en bremsesekvens påføres ved å kortslutte de aktuelle spolene gjennom motoromformeren for å sikre at rotoren står stille før du forsøker å starte rotasjonen. Når initialiseringssekvensen er fullført, etter rundt 3,5 ms, går driveren inn i hvilemodus med alle MOSFETer slått av og venter på ytterligere instruksjoner fra vertssystemet.
Hastighet
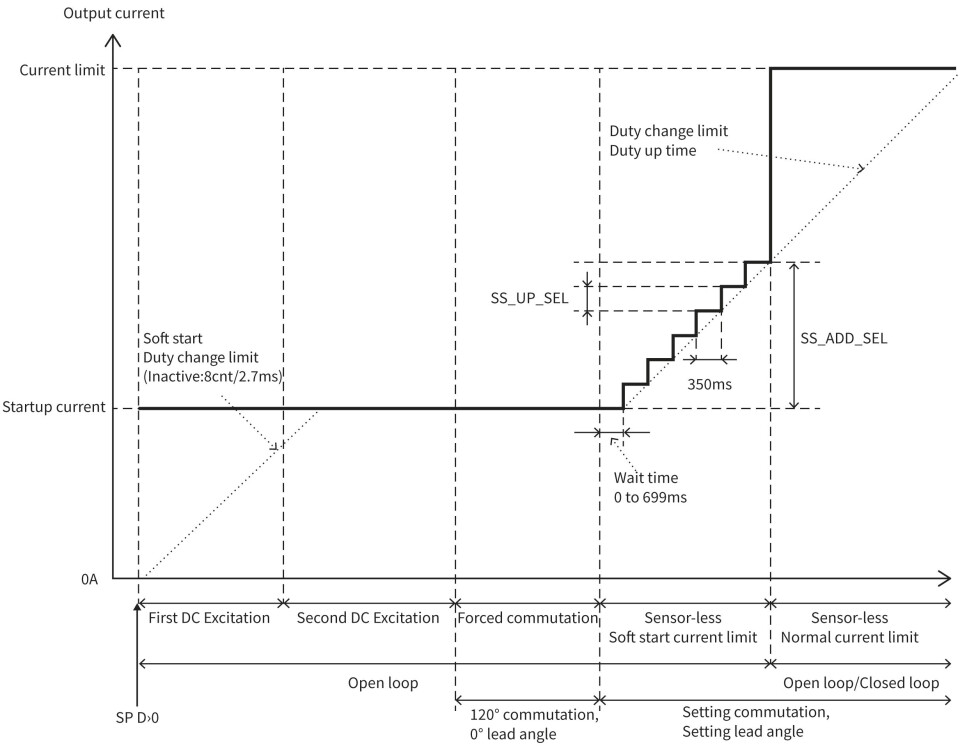
Den ønskede hastigheten kan defineres via I2C til hastighetskommandoregisteret (SPD) eller brukes som et PWM eller analogt signal til SPD-pinnen. Når en av disse mottas, kobles motorstartsekvensen inn. Prosessen begynner med en DC-eksitasjon av motorspolene som flytter rotoren til startposisjonen. Når dette er fullført, starter tvungen kommutering av motoren. På dette stadiet påføres et grovt elektrisk felt i 120° kommutering for å generere en innledende bakover-EMF. En konfigurerbar mykstartfunksjon er også inkludert (som illustrert i figur 3), som begrenser strømmen som trekkes når motoren starter opp. All hastighetskontroll på dette stadiet er åpen sløyfe.
Systemet endres til sensorfri styring, med gjeldende grense satt for normal drift, så snart motoren roterer raskt nok til å generere en bakover-EMF som kan brukes for styringsalgoritmen. Hastighetsstyring i lukket sløyfe kan deretter aktiveres.
Tomgangsbevegelse
Rotoren kan allerede være i bevegelse før strøm tilføres, noe som for eksempel kan være forårsaket av luft som passerer over bladene på en vifte. I dette tilfellet, kjent som tomgang eller vindmølle-effekt, vil motordriveren hoppe over de første eksiterings- og tvungen-kommuteringstrinnene og fortsette direkte med sensorfri drift. I en typisk applikasjon kan evnen til å måle bakover-EMF være overdrevent følsom i denne typen situasjoner, noe som får driveren til å feilaktig prøve å hoppe over de første oppstartstrinnene i åpen sløyfe. TC78B011FTG forhindrer dette ved å tilby et register som lar konstruktøren endre minimum rotorhastighet ansett som hurtig nok til å hoppe over oppstartsprosessen. Alternativt, for å unngå utfordringene forbundet med å starte en tomgangsmotor, kan styringen konfigureres til å bruke bremsesekvensen hver gang etter at den har gått fra standby eller aktiv modus, slik at rotoren alltid kan starte fra en stillestående tilstand.
Bedre justeringsmuligheter
For å tillate fleksibel hastighetsstyring i lukket sløyfe-modus, tilbyr TC78B011FTG IC registre for å stille inn tiden mellom hver trinnendring i hastighet og for å bestemme hvor raskt hastighetsendringene kan skje. De støttede hastighetsinnstillingene kan konfigureres gjennom individuell styring av start-, stopp- og maksimal arbeidssyklus. Turtallet knyttet til start- og maksimumsverdiene (som vist i figur 4) kan også stilles inn, og opptil to hastighetøkninger mellom start og maksimalt turtall kan defineres.

Frekvensen som brukes for PWM-utgangen kan settes til en fast verdi eller settes til å øke automatisk for optimal effektivitet når motorhastigheten øker. Det tilgjengelige frekvensområdet ligger mellom 23,4 kHz og 187,5 kHz. Justering av PWM-frekvensen hjelper også designere med å sikre samsvar med kravene til elektromagnetisk kompatibilitet (EMC) som er relevante for applikasjonen.
Det er også et register for justering av ledevinkelen i henhold til motorens egenskaper, noe som bidrar til å optimere energieffektiviteten og minimere hørbar støy. For mest mulig stillegående drift kan ledevinkelen stilles inn slik at bakover-EMF og motorstrøm er i fase.
MOSFET-drivere
IC-en inneholder tre halvbro pre-drivere for eksterne N-kanals MOSFETer. Disse kan levere en gate-source (VGSS) spenning på opptil 8V over motorens forsyningsspenning, og kan konfigureres til å levere gate-source (IGSS) strøm fra 10mA til 100mA for både høy- og lavside MOSFETer.
Den høyeste brukbare svitsjefrekvensen kan være begrenset av MOSFET-valget og motoren som brukes. Siden bakover-EMF måles for posisjonsføling under av-tiden til PWM, kan valg av en høyt induktiv motor, eller valg av MOSFETer med lav svitsjeytelse, føre til at posisjonsdeteksjon mislykkes. For å unngå dette kan den optimale PWM-frekvensen bestemmes ved å teste passende innstillinger under alle bruksforhold.
Sikkerhet
Brikken kommer også med sikkerhetsfunksjoner, inkludert forebygging av strømgjennomgang med konfigurerbar dødtid. Et statusregister indikerer unormale forhold, inkludert for høyt strømforbruk, lav ladepumpespenning, termisk avstengning og oppstartsfeil. En varselpinne settes når noen av disse forholdene oppstår. Denne pinnen brukes også til å indikere underspenning og motordrift utenfor de forhåndsinnstilte maksimal- og minimumshastighetene. Kontrolleren kan programmeres til å avvente et signal fra en ekstern kilde etter at en unormal tilstand er oppdaget eller forsøke å starte motoren på nytt i automatisk gjenopprettingsmodus.
Oppsummering
Designere kan dra nytte av BLDC-motorer, og spesielt den jevne og stillegående PMSM-typen, uten å gå i gang med et MCU-utviklingsprosjekt. De kan utnytte programmerbare kontrollere som er utstyrt for frittstående drift med styring i lukket sløyfe og parameteriserbar hastighetsinnstilling. Et MikroE-kort med Toshiba TC78B011 IC pluss utvalgte MOSFETer er nå tilgjengelig for evalueringsformål. Dette vil ytterligere lette utviklingsprosessen for motorsystemer.





























