Samarbeid om testmiljø for autonom parkering
Anritsu, dSPACE og Apposite Technologies samarbeider for å realisere et AVP-testmiljø for autonom parkering.

Publisert
Sist oppdatert
Denne artikkelen er 2 år eller eldre
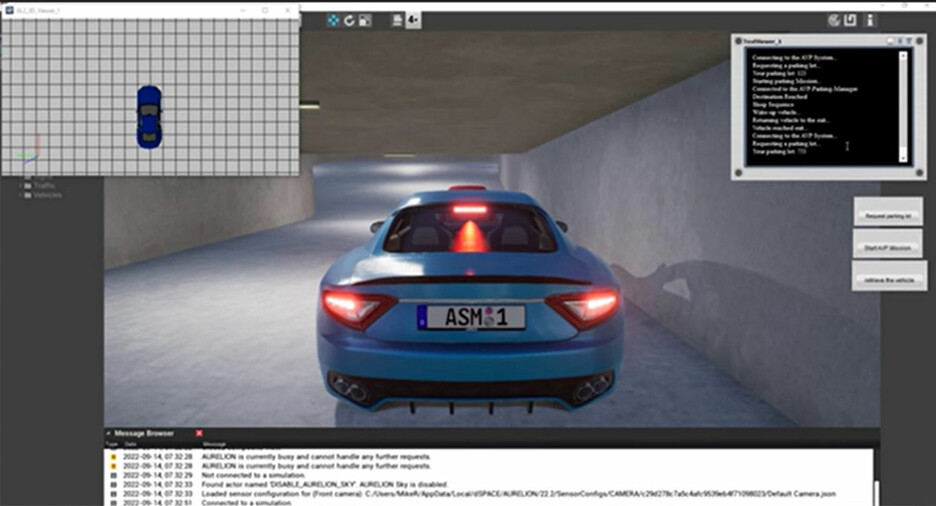
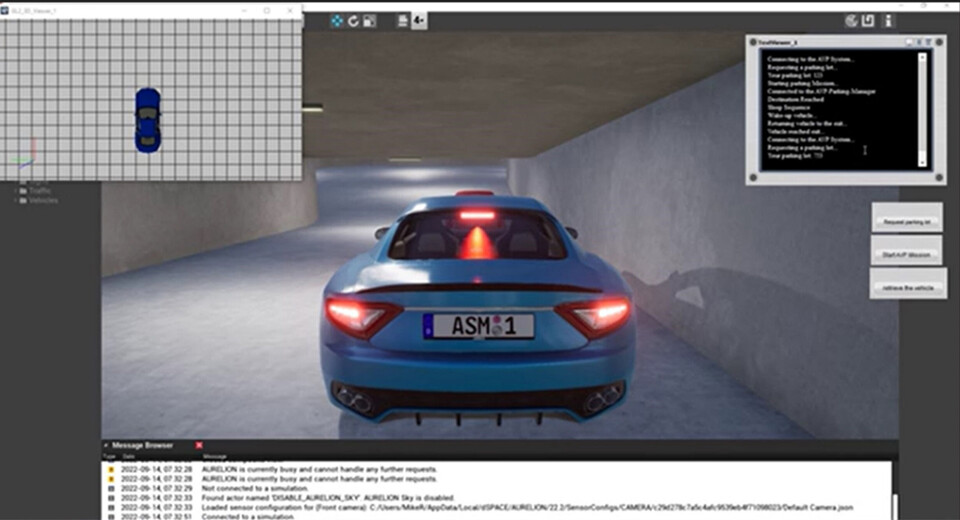
Anritsu har utviklet et test- og simuleringsmiljø for automatisk parkering (Automated Valet Parking – AVP) i samarbeid med tyske dSPACE og amerikanske Apposite. En demonstrasjonsutstilling ble holdt som en del av arrangementet 5GAA Member Symposium i Malaga, Spania 20. oktober.
Betjent parkering er en tjeneste der en profesjonell parkeringsvakt parkerer sjåførenes biler på store parkeringsanlegg og kommersielle anlegg, hovedsakelig i Europa og USA. AVP gjør at denne parkeringen kan gjøres automatisk, uten sjåfør i kjøretøyet. AVP Technical Report Versjon 1.0 ble utgitt av 5GAA i juni 2022, og et driftsopplegg for trådløs kommunikasjon (Type-2) knyttet til parkeringshusinfrastruktur og brukernes smarttelefoner ble foreslått.
AVP utvikles for autonom kjøring som kan implementeres på kort sikt. AVP Type-1 autonomt kjørende kjøretøy krever kostbar høyytelses databehandling og sensing, mens AVP Type-2 kommunikasjonssamarbeidende kjøretøyer ikke krever slike installasjoner, noe som reduserer kjøretøykostnadene og gjør implementeringen enklere.
Siden AVP Type-2 krever svært pålitelig ende-til-ende-kommunikasjon, må et testsystem evaluere QoS-administrasjon og svekkelseseffekter i IP-laget. Det trådløse tilkoblingsmiljøet må også evalueres. Testløsningen satte opp et digitalt tvillingmiljø med både virtuelle og ekte enheter. Dette gjør at systemtestene og sertifiseringen som kreves for å forbedre påliteligheten til AVP Type-2 kan startes før det faktiske utstyret er tilgjengelig.
Automotive OEM-er, Tier 1-leverandører og mobilnettoperatører har vist stor interesse for demonstrasjonen, i følge Anritsu.